Mobilen rymmer en arsenal av avancerade mätinstrument – flera med en spännande historia. Vi kartlägger hur mobilen omvandlar rörelse, läge och miljö till ettor och nollor.
Benefon Esc – den första GPS-mobilen i fickformat – lanserades 1999. Något år senare började kameramobilerna slå igenom på bred front och det var just foto och positionering som skapade behovet av sensorer i mobilen. Erik Ström, professor i kommunikationssystem och ansvarig för kompetensområdet sensorer på Chalmers fordons- och trafiksäkerhetscentrum Safer menar att mobilerna spelar en viktig roll för utvecklingen av sensorer.
– Mobilerna är en väldigt stor marknad. Det går att utveckla nya saker enbart för mobiler och få bra ekonomi. Idag driver mobilindustrin utvecklingen, men samtidigt har många sensorer sitt ursprung i gammal spjutspetsteknik från rymdkapplöpningen och det kalla kriget.
Problemet som drabbade både kartor och kamerabilder var hur mobilen skulle kunna räkna ut sitt läge i förhållande till verkligheten. För att spara och skicka bilderna på rätt sätt behöver mobilen veta om kameran är i stående eller liggande läge medan kartprogrammet behöver veta kompassriktningen för att kunna passa kartan. Med en bilnavigator eller med en kartplotter till sjöss kan man lätt vrida kartan rätt så länge man är i rörelse – allt som krävs är att räkna ut kursen mellan de två senaste positionerna. En mobil i handen på en fotgängare är en större utmaning. Man tar några steg, stannar upp och tittar på skärmen – men blir inte mycket klokare eftersom kartbilden antingen visar norr uppåt eller tycks snurra slumpmässigt. Mobilen har svårt att se skillnad på vad som är en verklig rörelse och vad som är brus i GPS-signalen.
Annons
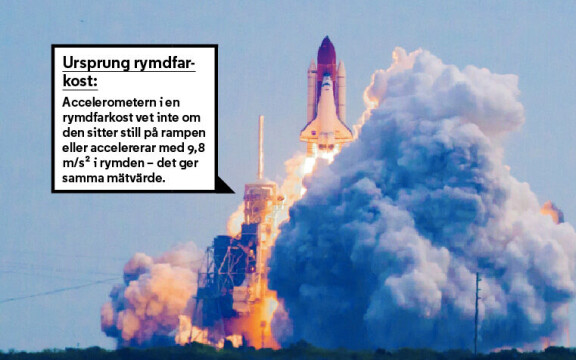
Kameraproblemet kräver en sensor som håller reda på vad som är upp och ned i förhållande till mobilen. En gammal metod var att fylla en liten behållare med kvicksilver och låta den flytande metallen sluta en krets mellan olika kontakter beroende på lutningen, men kvicksilver är giftigt och brytarna var dessutom för klumpiga för att platsa i mobiler. Lösningen blev istället att bygga in en sensor som utvecklats och förfinats inom sjöfart och rymd- och flygindustri: accelerometern. Principen för en accelerometer är att hänga upp en vikt i fjädrar och mäta hur mycket fjädrarna töjs ut när hela konstruktionen sätts i rörelse. Töjningen – alltså kraften i accelerationen – går att mäta på olika sätt. De första kommersiella elektriska accelerometrarna kom på 1920-talet och använde trådtöjningsgivare – metalltrådar som ändrar elektriskt motstånd när de utsätts för dragkrafter. Senare kom piezoelektriska eller piezoresistiva sensorer. Piezo är grekiska för »pressa« och sensorerna innehåller kristaller som får olika elektriska egenskaper beroende på trycket. Accelerometern är en viktig del i många avancerade navigationssystem. Vid raketuppskjutningar används accelerometrar för att avgöra när kraften börjar avta och det är dags att tända nästa steg, men sensorerna finns i många olika varianter och med olika mätområden och känslighet för att passa allt från att utlösa airbags till att övervaka vibrationer på pumpar eller mäta hur byggnader rör sig när det blåser. Accelerometern kan inte skilja på tyngdkraft och acceleration. Det har både för- och nackdelar. Om sensorn sitter i en rymdfarkost vet den inte om den sitter still på uppskjutningsrampen eller om den accelererar med 9,8 m/s2 ute i rymden – det ger samma mätvärde. 9,8 m/s2 brukar också kallas »1G«, tyngdacceleration eller normalacceleration.
Det är jordens dragningskraft på accelerometern som gör att mobilen kan bestämma sitt läge. I de flesta mobiler sitter en så kallad treaxlig accelerometer. Tre axlar innebär att mobiler mäter accelerationen i tre olika ritningar som brukar benämnas x, y och z. Genom att kombinera värdena från de tre accelerometrarna går det att räkna ut både hur stark accelerationen är och dess riktning i tre dimensioner. När mobilen mäter upp en acceleration som motsvarar tyngdaccelerationen behöver den bara beräkna riktningen för att avgöra om kameran ska ta stående eller liggande bilder, hur gränssnittet ska vridas eller om mobilen ligger med skärmen uppåt eller nedåt.
Annons
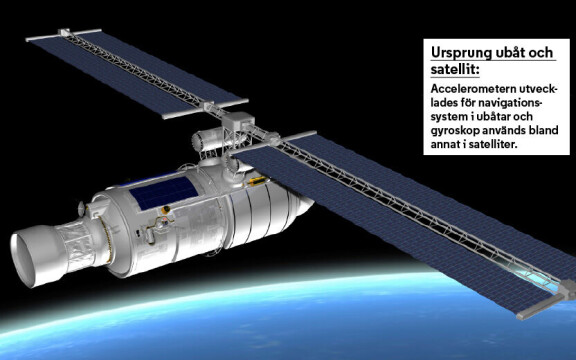
I flyg och under ytan Accelerometrarna utvecklades inte bara för flyget utan används också under ytan – i navigationssystemen på ubåtar. I undervattensläge fungerar varken GPS, landbaserade radiosystem eller astronomiska metoder. Det som återstår är så kallad död räkning. Det innebär att man väldigt exakt noterar alla kurs- och hastighetsförändringar. Genom att hela tiden hålla koll på riktning, hastighet och tid vet man – åtminstone i teorin – var man befinner sig. Ubåtens accelerometer ingår i ett så kallat tröghetsnavigeringssystem som levererar latitud och longitud digitalt ungefär som en GPS – men med betydligt sämre precision. Accelerometern är en viktig sensor i systemet eftersom den håller koll på om ubåten girar eller ändrar hastighet. Accelerometern kan inte skilja på jordens tyngdkraft och accelerationskraften vid rörelser så beräkningarna blir snabbt fyllda med små felaktigheter – och eftersom alla värden multipliceras med tiden ökar felen exponentiellt ju längre tid som går från den sista säkra positionen. För att minska felen behövs en sensor som kan mäta om ubåten vrider sig i någon riktning i förhållande till sina egna axlar – ett gyroskop. Kombinationen av ett gyroskop och en accelerometer gör det möjligt att räkna ut hur en ubåt – eller mobil – rör sig. Både i förhållande till sig själv och i förhållande till omgivningen.
Klassiska gyroskop bygger på rörelsemängd och principen att något som snurrar vill bevara riktningen på rotationsaxeln. Det finns många enkla sätt att demonstrera effekten – till exempel en snurra som enkelt balanserar på sin spets när den är i rörelse, men välter när den slutar rotera. Eller ett cykelstyre som är trögare att vrida när framhjulet snurrar än när det står still. För att bygga en gyroskopsensor är det fullt möjligt att använda principerna från snurran och utgå från en roterande skiva – en rotor. Det behövs någon form av drivning som sätter rotorn i rörelse och sensorer – till exempel piezoelektriska givare – som mäter krafterna på fästpunkterna. All rotation som inte sker utmed exakt samma axel som rotorn ger en belastning i sidled på fästpunkterna som sensorerna kan registrera. Roterande gyroskop är dyra och mekaniskt komplicerade och används numera sällan som sensorer. Däremot är de viktiga som styrsystem i satelliter och på den internationella rymdstationen ISS. I satelliter vänder man på gyroskopets funktion och ersätter kraftsensorerna med en motoriserad upphängning som kan vrida rotorn i förhållande till satelliten. När rotorn vrids uppstår en motkraft som får hela satelliten att rotera. På så sätt kan man rikta in hela satelliten med hög precision utan att använda raketmotorer.
Annons
Moderna gyroskopsensorer går att bygga efter flera olika principer. I navigationssystem för ubåtar, flygplan eller rymdfarkoster används ofta optiska gyroskop – antingen med fiberoptik eller av ringlasertyp. Istället för att utnyttja rörelsemängden använder de optiska gyroskopen den så kallade Sagnac-effekten. En laserstråle leds i cirklar – antigen med hjälp av speglar eller med fiberoptik – så att det uppstår ett stående vågmönster (inferens). När laserringen roteras uppstår det små skillnader i tiden det tar för ljusvågorna som rör sig med respektive mot rotationsriktningen att ta sig runt. Det gör att vågmönstret förändras – och det kan registreras av en ljussensor och omvandlas till ett mycket exakt mått på vridningen. Fördelen med optiska gyroskop är färre rörliga delar och högre precision jämfört med rotorgyroskop. Men även optiska gyroskop är för klumpiga och dyra för att passa i mobiler.
För mobiler används mikroelektromekaniska system (MEMS) för att konstruera både accelerometrar och gyroskop. MEMS innebär att man bygger mekanik och rörliga delar med material och tekniker som liknar tillverkningen av halvledare och integrerade kretsar. Treaxliga gyroskop eller accelerometrar ryms i cirka 2 × 2 millimeter stora kapslar på mobilens kretskort jämfört med optiska gyroskop som är ungefär lika stora och tunga som en ishockeypuck – per axel. En accelerometer med MEMS-teknik fungerar som sina större släktingar – den centrala delen är en rörlig massa och runt den sitter sensorer som mäter krafterna när mobilen sätts i rörelse. MEMS-gyroskopet innehåller däremot varken rotorer eller laserstrålar utan svängkolvar – en lösning hämtad från naturen. Svängkolvar är från början ett balansorgan som finns på många flygande insekter. De består av vibrerande kroppar som rör sig i ett plan och har ungefär samma stabiliserande effekt som ett roterande gyroskop. I mobilen är de rörliga delarna bara några tiondels millimeter stora och vibrationen sätts igång av komponenter som kallas »comb drives«. Kraften som uppstår när gyrot vrids förskjuter den vibrerande delen i förhållande till den fjädrande upphängningen och de små rörelserna fångas upp av kapacitiva sensorer. Jämfört med sensorerna för rymd, flyg eller ubåt har mobilernas MEMS-teknik sämre precision. Utvecklingen går dock snabbt framåt och dagens MEMS-gyroskop klarar uppgifter som bara var möjliga med optiska sensorer för ett par år sedan. Tröghetsnavigering som fungerar för längre sträckor ligger fortfarande i framtiden, men funktionen står högt upp på tillverkarnas dagordning eftersom den kan användas för att hitta rätt inomhus där det saknas GPS-täckning. I teorin kan tröghetsnavigering ge bättre precision än lösningar som bygger på positionering via wifi eller mobilnät.
Annons
– Grundproblemet är att allt baseras på att man mäter krafter, berättar professor Erik Ström.
– Man måste integrera två gånger (först omvandla acceleration till hastighet, sedan hastighet till position) vilket gör att mätfelen fortplantar sig. Även små fel blir signifikanta över tid och mobilerna behöver säkra referenspunkter oftare än professionell tröghetsnavigering, säger han.
Annons
Accelerometer och gyroskop är mobilens rörelsesensorer. Men det finns också en grupp sensorer som kallas miljösensorer. Här hittar vi exempelvis termometer, barometer, hygrometer, ljussensor och kompass. Barometern och kompassen går att använda tillsammans med rörelsesensorerna för att göra navigeringen ännu bättre i många situationer. Precis som de första kompasserna som uppfanns för ungefär 1 000 år sedan använder mobilens kompass jordens magnetfält för att beräkna riktningen. Nokia 6110 Navigator från 2007 var en av de första mobilerna med funktionen och den löste det gamla problemet med att vrida kartan rätt för användare som står still med en handhållen enhet. Ett problem med magnetiska kompasser är att de magnetiska och geografiska polerna inte ligger på samma plats – det skiljer ungefär 800 km mellan de båda nordpolerna. Ju längre norrut man kommer desto större blir felet och i Sverige behöver man justera kompassen med ungefär en grad i söder och åtta grader i norr för att navigera exakt.
Enklare lösningar räcker I fartyg, där kompassen måste fungera oberoende av andra system, använder man avancerade gyrokompasser för att komma till rätta med felvisningen, men i mobilen räcker det med enklare lösningar. Eftersom man kan räkna ut hur stor felvisningen är på en viss plats räcker det med en position via GPS eller mobilnätet för att få riktningen till den geografiska nordpolen istället för den magnetiska. Till skillnad från vanliga kompasser med roterande nål har mobilens kompass inga rörliga delar. Istället används tre stycken halleffektsensorer – monterade parallellt med mobilens x-, y- och z-axlar – som tillsammans kan räkna ut magnetfältets storlek och riktning väldigt exakt. Halleffekten är en spänning som går att mäta med en voltmeter när en elektrisk ledare utsätts för ett magnetfält. Precis som andra magnetkompasser påverkas mobilen av metallföremål och elledningar, men eftersom det finns fler sensorer för rörelse och position går det ofta att kalibrera mobilen så att den visar rätt även där det finns störningar. Kompassen i mobilen vrider kartan rätt och ser till att bilder geotaggas med rätt riktning, men den förbättrar inte noggrannheten i positionen. Det kan däremot barometern göra – närmare bestämt i höjdled. GPS har bra precision när det gäller latitud och longitud, men höjdvisningen är inte lika exakt. Barometern i en mobil kan känna av höjdskillnader på så lite som 30 centimeter och klarar exempelvis att räkna ut vilken våning du befinner dig på i en byggnad. Lufttrycket varierar alltså med höjden, men beräkningarna kompliceras av att trycket också varierar med vädret. Därför måste man veta vad en barometer som befinner sig i närheten och på känd höjd visar för att kunna omvandla lufttryck till meter över havet. För mobilen är det en enkel match eftersom det finns uppkopplade väderstationer över hela världen som kan leverera aktuella värden.
Mobilens sensorer levererar mycket data och precisionen ökar både genom att själva sensorerna förfinas och genom att mobilen får större beräkningskraft. Apple har satsat på en särskild hjälpprocessor för rörelsesensorerna som kallas M7 och många sensorer innehåller en egen processor som förädlar mätvärdena innan de skickas till mobilens CPU. Det ständigt ökande antalet smarta mobiler gör att vi kommer att få se många nya tillämpningar för sensorer – från mätningar och bättre positionering i mobiler till tjänster som samlar in data från 1 000-tals användare för att skapa bättre väderprognoser, täckningskartor eller trafikinformation.
Annons
Lista: Åtta av mobilens sensorer
1 - Termometer Nästan alla mobiler har en intern termometer som håller koll på batteriets status. Vissa kan även mäta i en yttre punkt på skalet. Temperatursensorn består av ett material som leder ström olika bra vid olika temperatur och kretsar som omvandlar ledningsförmågan till ett digitalt värde.
Annons
2 - Hygrometer En sensor som mäter luftens fuktighet. I mobilen sitter den ofta i samma kapsel som temperatursensorn. Hygrometern består av en öppen kondensator som klarar att hålla olika mycket laddning beroende på luftfuktigheten. Samma effekt som gör att man lättare får stötar av statisk elektricitet när luften är torr.
3 - Barometer Barometern gör det möjligt för mobilen att mäta lufttrycket. Den består av ett membran som rör sig när trycket förändras och en så kallad piezoelektrisk sensor som omvandlar rörelsen till en signal som digitaliseras.
Annons
4 - IR-sensor En avståndssensor som oftast sitter intill videosamtalskameran på mobilen. IR-sensorn skickar iväg en osynlig infraröd ljusstråle och mäter små avstånd genom att registrera om ljuset studsar på något. Sensorn består av en lysdiod och en fototransistor. Signalen används för att stänga av pekskärmen när mobilen hålls mot örat.
5 - Kompass Kompassen i en mobil består av tre så kallade magnetometrar – halleffektsensorer – som mäter storleken och riktningen på magnetfälten runt mobilen. Jordens magnetfält, som vrider nålen i en mekanisk kompass, ger utslag på de tre sensorerna. Värdena digitaliseras och mobilen kan räkna om dem till en riktning.
Annons
6 - Gyroskop En rörelsesensor som kan mäta om mobilen roterar i förhållande till sin egen axel. Sensorn utnyttjar fenomenet att en massa som vibrerar i en riktning »gör motstånd« om man försöker vrida på den. Gyroskopet byggs som ett så kallat mikroelektromekaniskt system (MEMS) och består av en massa som sätts i rörelse och sensorer som mäter belastningen och från det räknar ut hur mobilen vrids.
7 - Accelerometer Accelerometern mäter tyngdkraft och acceleration. När mobilen är stilla ger den information om läget – alltså hur mobilen hålls eller ligger – och om mobilen sätts i rörelse talar sensorn om hur hastigheten förändras och i vilken riktning. Accelerometern byggs med MEMS-teknik och består av en liten fjäderupphängd tyngd med belastningssensorer på fästpunkterna.
8 - Ljussensor Används i första hand för att justera ljusstyrkan på skärmen automatiskt. Sensorn består av en fototransistor – en halvledare som förstärker elektrisk ström olika mycket beroende på omgivningens ljus. Sensorn i mobilen är försedd med filter som gör att den bara reagerar på synligt ljus.
Lista: Framtidens användningsområden Infrarött och ultraviolett Funktion: Ta selfie och se var du missat med solkrämen. Dagens mobilkameror är byggda för att avbilda verkligheten som vi ser den och fångar därför upp samma ljusfrekvenser som ögat ser. Men det finns mycket att se i både de infraröda (lägre frekvenser) och ultravioletta (högre frekvenser) områdena. Med större omfång skulle mobilen kunna avbilda värmestrålning. En värmekamera i mobilen skulle kunna mäta temperatur på avstånd eller ge bilder som visar var huset behöver mer isolering. Även ultraviolett kan vara intressant – ta en UV-selfie på badstranden för att kontrollera att inga ytor missats med solkrämen.
Ultra-Wideband och SDR Funktion: Hitta position inomhus där GPS inte funkar. Radiodelarna i dagens mobiler utför väldigt specifika uppgifter och förädlar signalerna till datapaket eller positionsinformation innan de når mobilens processor. Genom bredbandiga mottagare och avkodning i mjukvaran – Software Defined Radio (SDR) – skulle mobilen kunna bestämma positionen inomhus väldigt exakt genom att mäta radiomiljön.
Ultraljud Funktion: För att mäta avstånd med hög precision. En ultraljudssensor skulle kunna fungera genom att mobilerna får mikrofon och högtalare som klarar betydligt högre frekvenser än örat uppfattar. Genom att höja taket från cirka 20 kHz till det dubbla eller tredubbla går det att mäta avstånd med hög precision genom att skicka ut ljudpulser och mäta hur snabbt ekot kommer tillbaka. Samsung har släppt en ultraljudssensor i form av ett skal, så mobiler med funktionen inbyggd behöver inte vara långt borta.
Ekolod Funktion: Mäta vattendjup och se var fiskarna simmar. Förbättrade högtalare och mikrofoner i kombination med vattentäta mobiler kan öppna för avståndsmätning även i vatten. Ekolod fungerar ungefär som ultraljudsmätning av avstånd på land med skillnaden att ljud rör sig snabbare genom vatten än genom luft. Genom att hålla mobilen under ytan skulle det bli möjligt att både mäta djupet och se om det finns fisk i närheten.
Radar Funktion: Mäta hastighet med hög precision. Radar fungerar på sätt och vis som andra avståndsensorer – en signal skickas ut och man mäter hur lång tid det tar för den att studsa tillbaka. Radar använder radiovågor istället för ljud eller ljus och med hjälp av dopplereffekten kan man mäta hastighet med hög precision. Lyckas man bygga in en radarsensor i mobilen öppnas möjligheter som att mäta hastigheten på golfswingen eller hur djupt kablarna till utebelysningen är nedgrävda.
Laserskanner Funktion: Skicka fysiska föremål som mms. Med en laserskanner i mobilen skulle det bli möjligt att skicka föremål som MMS – åtminstone om mottagaren har en 3D-skrivare. Skannern använder en laserstråle, rörliga speglar och en ljussensor för att ta en bild av omgivningen. Skillnaden är att varje pixel i bilden består av avståndsinformation istället för ljusstyrka och färg.
Gas- och partikelsensor Funktion: Möjligt att mäta alkohol, grandgaser mm. Dagens mobiler har ögon, öron och ett väl utvecklat balanssinne, men saknar näsa. Vissa gaser och ämnen går att mäta med sensorer som skulle kunna få plats i mobiler – till exempel alkoholångor, koldioxid, brandgaser eller gasol. Sensorerna fungerar till exempel med hjälp av bränsleceller som avger ström när ett visst ämne finns i luften eller genom att mäta hur strålning eller ljus absorberas mellan en källa och en detektor.
Lista: Gamla sensorer lär sig nya konster
Pulsmätare
Mobiler med kamera och fotobelysning kan mäta frekvensen på hjärtslagen. Genom att man håller fingret mot kameralinsen samtidigt som fotolampan lyser kan mobilen »se« varje slag genom att ljuset varierar lite beroende på trycket i fingrets blodkärl.
Metalldetektor
Kompassen i mobilen mäter inte bara jordens magnetfält utan reagerar även på exempelvis metaller eller strömförande sladdar. Kanske inte rätt verktyg för att hitta en borttappad ring på sandstranden, men den fungerar bra för att hitta stålreglar bakom en gipsskiva.
Gitarrstämmare
Mobilens mikrofon fungerar utmärkt för att mäta frekvensen på ljud. De flesta appar i genren är inriktade på gitarrstämning, men det går också att testa andra instrument eller den egna tondövheten.
Vattenpass
Mobilens accelerometer kan mäta lutning med hög precision – oavsett om du använder mobilen platt mot en bordsyta eller mot väggen. Apparna kan behöva kalibreras, men när det är gjort blir mobilen ett bra alternativ till vanliga vattenpass.
Stegräknare
Ännu ett användningsområde för accelerometern. Genom att använda mobilen som stegräknare kan träningsapparna även logga ett pass på löpbandet.