Heres Traffic Center, där insamlade data analyseras.
Googles välbekanta navigeringsbil
När mobilen uppmanar dig att svänga till höger om 300 meter är det flera lager av information och avancerade beräkningar som ligger bakom. Vi har tittat under huven på tjänsterna och följt arbetet från kartmätningar till fungerande appar.
Grunden i alla navigatorappar är kartan. En digital karta är ett gigantiskt samarbetsprojekt med miljoner människor involverade. Den grupp som har kartor som sitt yrke utgör bara toppen av isberget. Om du har en smart mobil eller brukar köra med gps i bilen är sannolikheten stor att faktiskt du som användare också bidragit till att göra kartorna bättre.
– För att skapa bästa möjliga karta samlar vi in data från över 80 000 olika källor spridda över hela världen. Från nationella och regionala myndigheter till slutanvändare, berättar Cliff Fox, direktör för Location Content på Nokias kartbolag Here i Chicago.
Två varumärken dominerar på kartmarknaden – Here och Tomtom. Nokiabolaget Here hette tidigare Navteq och har huvudkontor i Chicago. Nederländska Tomtom tog sig in på kartmarknaden genom köpet av Teleatlas. Även Google har seglat upp som en gigant på kartmarknaden, men deras fokus ligger på webb och visualisering snarare än navigation. Vi återkommer till det senare.
Det är ett stort antal olika delar som måste fogas samman för att skapa en karta med global täckning.
En stor del av det insamlade materialet är sekundärdata – det kan alltså ha tagits fram för att lösa helt andra uppgifter än att ingå i en kartdatabas som ska fungera på samma sätt över hela världen. Därför krävs det ett omfattande arbete för att standardisera kartorna och lägga till de uppgifter som saknas. Ett verktyg som kartleverantörerna använder är lokala team som kör på vägarna med speciella mätbilar.
Bilarna använder ett stort antal olika sensorer och samlar en mängd olika uppgifter som tankas in i kartproduktionen – du ser detaljer om det här i faktarutan om just mätbilarna. De bilarna gör det möjligt att skapa en långt mer detaljerad karta än med gamla metoder. Tidigare var bilarnas viktigaste funktion att spela in ett gps-spår för att fastställa att vägarna verkligen låg exakt på den plats som andra kartor påstod. Numera bygger mätbilarna upp en 3D-modell av vägbanan och omgivningen, komplett med foton i alla riktningar. De enkla gps-spåren får kartföretagen istället från det som branschen kallar »probes« – användare som är ute och kör med uppkopplade enheter. Probes kan vara allt från åkerier med fast monterade antenner på bilarna till vanliga mobilanvändare. Som användare av någon kartapp bidrar du alltså till att uppmärksamma karttillverkarna på nya och förändrade vägsträckningar bara genom att använda kartan i din mobil.
Att bygga upp en karta från grunden är en krävande process, men enligt Cliff Fox på Here är den stora utmaningen att hålla kartan uppdaterad.
Annons
– Vi gör mer än 2,7 miljoner uppdateringar i kartan varje dag för att säkerställa att den är korrekt och aktuell. Huvuddelen av våra resurser går till att verifiera och uppdatera kartan efter förändringar i vägnätet.
Data från myndigheter är till stor nytta för uppdateringsarbetet. Andra källor – inklusive kartföretagens egna mätningar – uppdateras först när förändringen redan har skett. Myndigheterna – till exempel Trafikverket och Lantmäteriet i Sverige – har uppgifter om vad som är på gång. I kombination med data från probes kan det korta ned tiden som krävs för att få in en ny väg i kartan. Uppdateringen kan förberedas utifrån myndigheternas byggplaner och så fort probe-data bekräftar att trafiken tar den nya vägen kan kartföretaget »trycka på knappen« och publicera en uppfräschad karta.
Annons
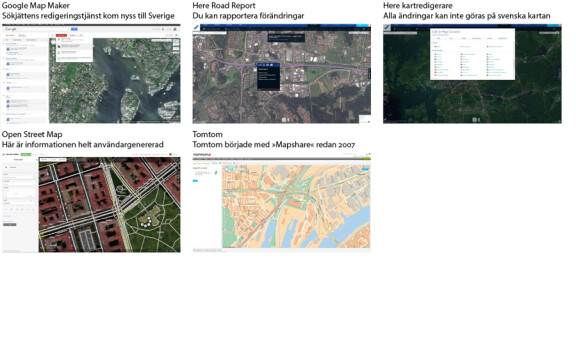
Det är långt ifrån alla vägförändringar som går att få kännedom om i förväg och mätbilarna hinner bara kontrollera en liten del av vägnätet inför varje kartrelease, så användarna spelar en viktig roll för kvaliteten. Probe-data samlas in genom de flesta kartappar och uppkopplade enheter helt automatiskt, men många användare bidrar också aktivt med uppdateringar. Waze-appen (numera köpt av Google) och Open Streetmap bygger – åtminstone i Sverige där även myndigheternas kartor kostar pengar – helt på användardata. Även de kommersiella tjänsterna använder mer och mer crowdsourcing, vilket innebär att varje användare helt enkelt kan bidra med uppdateringar. Tomtom började med funktionen »Mapshare« i sina navigatorer redan 2007. Med en knapptryckning kunde man notera ett fel i kartan och föreslå en ändring enligt några olika fasta alternativ. I början var man tvungen att synka navigatorn med en dator för att skicka in ändringarna, men med mobilappar och »Live«-enheter med uppkoppling fungerar rapporteringen bättre och snabbare.
Google öppnade nyligen sin »Map maker«-tjänst i Sverige. Där kan vem som helst rapportera in fel i kartan eller lägga in helt nya objekt som vägar, byggnader och intressepunkter. Ändringarna granskas av moderatorer och kan vara publicerade på Google Maps inom bara några timmar. Here har ett liknande verktyg på sin sajt, men det är bara i vissa regioner som användarna har tillgång till alla funktioner – i Sverige kan man för tillfället bara rapportera in fel. Många ändringar – till exempel gator som blir enkelriktade eller nybyggda rondeller – går att fånga upp med bara probe-data, men vid ändringar som ny skyltning eller faror utmed vägen behövs en aktiv community.
Annons
Att bygga appar
Here, Google och Tomtom har alla tre egna navigatorappar, men det finns många utvecklare som köper in kartdata och bygger en unik app – till exempel genom att komplettera med lokala datakällor eller med egna lösningar för att räkna ut rutterna.
Annons
Vi besökte företaget Appello i Göteborg, som ligger bakom bland annat Wisepilot och Telia Navigator, för att få en inblick i vad som krävs för att bygga en navigatorapp.
– En navigatortjänst består av tre lager, berättar Leif Sundström, chef för affärsutvecklingen på Appello.
Annons
Första lagret är grunddata, med bland annat vägnätet. Sedan behövs en plattform som beräknar rutter och bestämmer hur kartorna ska visas. Den kallas för LBS-plattform. Ovanpå det bygger man apparna med gränssnitt för mobil eller webb.
– Alla börjar med data i ett standardiserat format som är grunden för den här typen av tjänster och kallas för GDF-format. Det innehåller mycket av den information man behöver och sedan filtrerar man ner för att få rätt information i ett format som fungerar för apputveckling, berättar Rasmus Ahlberg, produktstrateg på Appello.
Annons
GDF-filerna kommer ofta från Here eller Tomtom och där ryms all information om var vägarna finns och hur de ser ut med kapacitet och trafikregler. Filerna innehåller också annan geografisk information som städer, intressepunkter, vattendrag och gränser som tillsammans kan bilda en komplett karta. Men filerna innehåller inte bara kartdata – de stora leverantörerna har också ytterligare uppgifter som vägskyltar, information om körfält och avfarter och nya typer av information. Ett exempel på det är vad Here kallar »natural guidance« eller naturlig vägledning – att samla information som gör det möjligt för navigatorappen att leverera instruktioner i stil med »sväng höger vid kyrkan« istället för bara »om 300 meter – sväng höger«. Här ligger både Tomtom och Here steget före exempelvis Google, menar Appello.
Nästa lager är LBS-plattformen. Förkortningen står för Location Based Service och det är här som kartbilder, sökfunktioner och ruttberäkningar skapas.
Annons
– GDF-formatet är knöligt. Det talar om vad som finns på kartan, men inte hur kartan ska se ut. Språk, gränser och vad som ska synas på vilken zoomnivå måste hanteras, förklarar Rasmus Ahlberg.
För kartlagret finns bara två heltäckande leverantörer, men när det gäller LBS är alternativen fler och det är möjligt för app-företagen att utveckla en plattform med egna funktioner. Leif Sundström berättar att Appello använder en serverbaserad LBS-plattform som de köper in från amerikanska företaget Decarta och integrerar i tjänsten. Here, Tomtom, Google, Garmin och många andra företag i branschen har egna plattformar och det krävs ett betydande utvecklingsarbete för att få ihop en väl fungerande lösning.
Utmaningen Apple underskattade
Apple underskattade utmaningen rejält inför lanseringen av Ios 6. Apple hade tecknat ett avtal med Tomtom för att få in kartdata och kände sig trygga med sin egen förmåga att utveckla snygga appar och gränssnitt, men det viktiga lagret mellan kartorna och appen saknades. Apple hann inte i mål på den tid som fanns till förfogande och resultatet blev som bekant inte av den kvalitet som kunderna förväntade sig. Kartan såg konstig ut med orter som inte märktes ut eller fick fel namn, det var svårt att få träff via sökfältet och rutterna tog ibland långa, i vissa fall till och med farliga, omvägar. Så varför satte Apple varumärket på spel genom att lansera en halvfärdig kartapp? Sannolikt handlade det om att få in mer information om användarna. Apple hade redan koll på var alla enheter befann sig, men genom att ta tillbaka sökfältet för kartor och vägbeskrivningar från Google fick man också grepp om vilka platser användarna är intresserade av eller på väg till.
Sökfunktionerna gör att LBS-plattformen måste kunna hantera konflikter i informationen. I en bilnavigator kan det räcka med att använda intressepunkter från Here eller Tomtom, men i mobilen ger det inte en tillräckligt bra användarupplevelse. Om sökfälten i webbläsaren eller hos lokala katalogtjänster ger bättre träffar tappar man förtroendet för navigatorappen. Därför behövs fler källor och det är inte ovanligt att samma sökord levererar helt olika information beroende på om frågan ställs till kartföretagen, till generella sökmotorer eller till exempelvis Eniro. En väl fungerande LBS-plattform lämpar inte över alla träffar på användaren utan gör en kvalificerad prioritering – till exempel genom att rangordna källornas trovärdighet eller genom att filtrera bort information med gammalt datum.
Trafikinformation och rutter
När du valt destination är det LBS-plattformens uppgift att föreslå den bästa vägen. I vissa appar – till exempel Tomtom, Navigon eller Nokia Here – sker beräkningen i mobilen. Appello och Google gör uträkningen på servrar i molnet. Lösningarna har olika för- och nackdelar. Med hela LBS-plattformen i din enhet behövs ingen uppkoppling. Så fungerar de flesta fristående navigatorer och metoden kan vara bra även i mobilen. Till exempel för att slippa dataförbrukning utomlands. Beräkningar på serversidan kan å andra sidan göras snabbare och ta hänsyn till fler faktorer. Servern kan också dra nytta av andra användares sökhistorik för att optimera populära resvägar och ytterligare vässa prestandan.
När en rutt ska beräknas bryts sträckan ner till ett stort antal segment. Varje del tilldelas en kostnad – vanligast är tid, sträcka eller bränsleförbrukning. Genom att testa ett stort antal olika vägar mellan start och mål kan LBS-plattformen hitta den bästa vägen. Den enklaste formen av beräkning använder bara kartans grunddata. Där finns naturligtvis uppgifter om hur långa olika vägsträckor är, men också hastighetsbegränsningar som används för att beräkna tiden. Mer avancerade plattformar nöjer sig inte med den skyltade hastigheten, utan använder historiska probe-data för att prioritera efter hur lång tid det verkligen tar att köra de olika vägalternativen. Tomtom IQ Routes är en av de mest kända produkterna för detta – här används en stor databas över faktiska färdtider för att få fram beräknad restid olika veckodagar och vid olika tid på dygnet.
IQ Routes och liknande lösningar bygger på historiska data, men beräkningarna kan också ta hänsyn till hur läget är just nu och vid behov runda köer och avstängda vägar. För några år sedan var den enda möjligheten att få in aktuella trafikförhållanden att i enheten ta emot trafikinformation som skickas ut via fm-radion, så kallat RDS-TMC. Tekniken finns fortfarande i många fristående navigatorer. I mobilen är det smartare att använda internetuppkopplingen. Dels blir informationen dubbelriktad – appen kan återkoppla automatiskt om ett hinder försvunnit och trafiken flyter normalt igen. Dels går det att ta emot mer exakt trafikinformation. I RDS-TMC kopplas alla händelser till en platskod som till exempel kan referera till vägsträckan mellan två motorvägsavfarter – en ganska grov indelning. Med internetbaserade system går det att lägga in händelser var som helst på en vägsträcka.
Det finns flera leverantörer som arbetar med att sammanställa trafikinformation. Globala såväl som lokala leverantörer sammanställer trafikinformation både för egna tjänster och för distribution till app-utvecklare. Arbetet handlar om att standardisera och koppla ihop samma typer av källor som används i kartutvecklingen – myndighetsdata, probes, egna mätningar och rapporter från användare. När det gäller trafikinformation tillkommer utmaningen att insamling, kontroll och distribution måste ske inom sekunder eller minuter snarare än veckor.
– Here samlar in 23 miljarder datapunkter från användarna varje månad och 80 procent av den probe-data vi använder är som mest 5 minuter gammal, berättar Cliff Fox.
Det sista lagret som krävs för en fungerande navigatorlösning är själva appen med användargränssnitt, stöd för olika språk och inte minst anpassning till olika mobilsystem. Android, Ios, Windows Phone och Blackberry fungerar på olika sätt och kräver mycket parallell utveckling. Både av själva programkoden och av grafiska element för att följa designreglerna för respektive system. Nokia och Here har försökt sig på att lansera navigation som en webbapp för att kunna utveckla en enda lösning som fungerar på alla system, men att navigera i webbläsaren har sina brister. Problemet är inte prestandan eller funktionerna i tjänsten, utan att mobilerna inte släpper tillräckligt mycket kontroll till en webbsida. En navigatorapp behöver fungera i bakgrunden och kunna förhindra att mobilen släcker skärmen eller intar viloläge – det klarar inte de webbläsare vi har i dag.
Framtiden
En viktig trend – både när det gäller bilnavigation och appar – är att kunna känna igen, eller till och med förutse, situationer och leverera rätt information och rätt användarupplevelse. Google Now är ett exempel på den färdriktningen – mobilen vet var du befinner dig och använder uppgifter från kartan för att tipsa om busshållplatser i närheten, aktuellt väder eller hur dags du måste köra för att hinna i tid till ett möte i kalendern. Kartföretagen satsar mycket på att utveckla gränssnitt och API:er som gör det möjligt att använda både deras trafikinformation och deras intressepunkter i denna typ av tjänster.
De flesta biltillverkare ligger i startgroparna för att bygga in olika typer av hjälpfunktioner till föraren baserat på vägen han eller hon färdas på. Enklare varianter kan handla om att bilen justerar belysningen precis före en tunnel eller varnar vid otillåten hastighet, men kartföretagen kämpar just nu om att få leverera de superdetaljerade kartorna som gör det möjligt för bilar att köra helt eller delvis på autopilot. Det är ett av de mer långsiktiga målen med den 3D-information som läggs till kartorna. Närmare i tid ligger nya typer av informationsvisning. Google Street View och Apples 3D-flygbilder har inte alls samma precision som går att uppnå om man kombinerar högupplösta foton med de mätningar med hjälp av laser som mätbilarna kan göra idag. Framtidens navigatorappar kommer att kunna leverera en nästan kusligt realistisk 3D-vy.
Mätbilar och tekniken bakom De olika företagens mätbilar används för att kvalitetssäkra data från andra källor och för att lägga till fler uppgifter i kartan – från bilder i gatunivå till körbanornas bredd, exakt lutning i backar och höjd på broar. Bilarna har ett antal olika sensorer till sin hjälp:
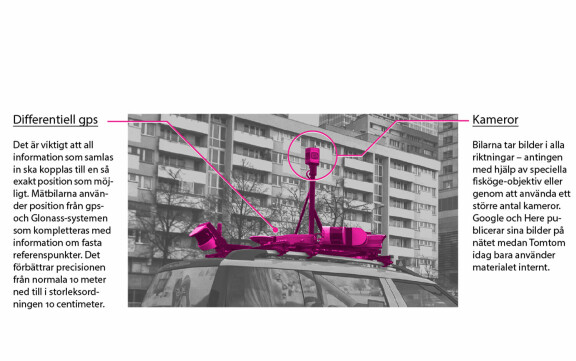
Differentiell gps Det är viktigt att all information som samlas in ska kopplas till en så exakt position som möjligt. Mätbilarna använder position från gps- och Glonass-systemen som kompletteras med information om fasta referenspunkter. Det förbättrar precisionen från normala 10 meter ned till i storleksordningen 10 centimeter.
Kameror Bilarna tar bilder i alla riktningar – antingen med hjälp av speciella fisköge-objektiv eller genom att använda ett större antal kameror. Google och Here publicerar sina bilder på nätet medan Tomtom idag bara använder materialet internt.
Vägmätare Hjulens rotation registreras som backup för gps-positionen – till exempel när mätbilen rör sig genom tunnlar.
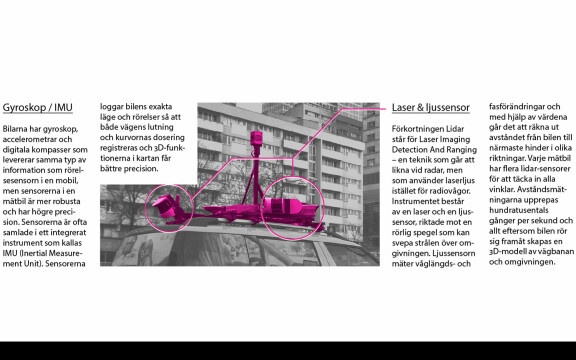
Gyroskop / IMU Bilarna har gyroskop, accelerometrar och digitala kompasser som levererar samma typ av information som rörelsesensorn i en mobil, men sensorerna i en mätbil är mer robusta och har högre precision. Sensorerna är ofta samlade i ett integrerat instrument som kallas IMU (Inertial Measurement Unit). Sensorerna loggar bilens exakta läge och rörelser så att både vägens lutning och kurvornas dosering registreras och 3D-funktionerna i kartan får bättre precision.
Laser & ljussensor Förkortningen Lidar står för Laser Imaging Detection And Ranging – en teknik som går att likna vid radar, men som använder laserljus istället för radiovågor. Instrumentet består av en laser och en ljussensor, riktade mot en rörlig spegel som kan svepa strålen över omgivningen. Ljussensorn mäter våglängds- och fasförändringar och med hjälp av värdena går det att räkna ut avståndet från bilen till närmaste hinder i olika riktningar. Varje mätbil har flera lidar-sensorer för att täcka in alla vinklar. Avståndsmätningarna upprepas hundratusentals gånger per sekund och allt eftersom bilen rör sig framåt skapas en 3D-modell av vägbanan och omgivningen.
Fyra globala leverantörer Marknaden för digitala kartor har fyra stora spelare – leverantörer som har kartor för en stor del av världen.
Here Here är det nya namnet för kartorna från Navteq. Företaget startade 1985 och lyckades på två år skapa en digital karta över området runt San Fransisco. Första produkten var en tjänst där hotell och biluthyrare kunde få vägvisning. Verksamheten tog fart på allvar när elektronikjätten Philips gick in som investerare 1989 och Navteq började sälja kartor vidare till andra tillverkare. Nokia köpte Navteq 2007 och under 2012 introducerades varumärket Here.
Tomtom Kartorna utvecklades från början av företaget Teleatlas som blev en del av Tomtom 2007. Teleatlas grundades 1984 och har länge varit en av de stora leverantörerna av kartor för bilnavigatorer och senare för karttjänster på nätet. Fram till 2009 kom en huvuddel av innehållet på Google Maps från Teleatlas. Idag består Tomtoms produkt av fyra lager – baskarta, rapporter från användare, ruttberäkningar och trafikinformation.
Google Sökmotorjätten kunde lansera sin egen karttjänst år 2005 efter köpen av företagen Where 2 Technologies och Keyhole. Google Maps kombinerar data från många olika tjänster. Tomtom är en stor leverantör, men Google köper också data direkt från lokala leverantörer – till exempel Lantmäteriet i Sverige. Genom egna mätbilar och data från Google Maps-användare har Google numera också eget kartmaterial för stora delar av världen. Google säljer dock inte datafiler till andra utvecklare på samma sätt som Here eller Tomtom. Det är genom ett kraftfullt API – färdiga kartfunktioner för webb- och apputvecklare – som Google Maps får sin stora spridning.
Open Streetmap Ett öppet alternativ till de stora kartföretagen. Open Streetmap har både en webbtjänst och nedladdningsbara data som kan användas ungefär som innehållet från Here eller Tomtom. Skillnaden är att kartorna på Open Streetmap kommer från tjänstens community eller från öppna myndighetsdata. Kvaliteten varierar kraftigt mellan olika platser, så det är svårt att bygga en app eller tjänst på enbart Open Streetmap.
GDF-formatet GDF – Geographic Data Files – är ett standardiserat format för geografisk information. När app-utvecklare köper data från de stora leverantörerna – Here och Tomtom – levereras det som GDF. Det finns många filformat som hanterar kartinformation – till exempel Shape eller Googles KML-format, men GDF är mer standardiserat och bättre kopplat till den fysiska verkligheten. För vägar finns det till exempel ett stort antal attribut som fungerar på samma sätt över hela världen. Allt från om en gata är enkelriktad eller inte till vägbeläggning, bredd, gatunummer och hastighetsgränser. Det första användningsområdet för formatet var att uppdatera biltillverkarnas kartsystem, men användningsområdena breddas och i den senaste versionen av standarden finns både 3D och stöd för navigation till fots.